|
HTV技術実証機
HTV技術実証機(HTVぎじゅつじっしょうき、HTV Technical Demonstration Vehicle: HTV-1)は2009年9月11日に打ち上げられた宇宙ステーション補給機(HTV)の初号機。日本の宇宙航空研究開発機構に所属。同月17日国際宇宙ステーション(ISS)に結合し、物資をISSに輸送した後、10月30日に結合を解除し、11月2日に大気圏再突入を果たした。HTVの愛称決定後は「こうのとり初号機」や「こうのとり1号機」とも呼ばれる。 ミッション内容目的HTV-1ミッションではH-IIBロケットの初打上げ、およびHTV-1によるISSへの補給物資の輸送を実施する。またこれと共に、以下の技術検証を行う[1]。
搭載品 補給キャリア与圧部の内部  補給キャリア非与圧部
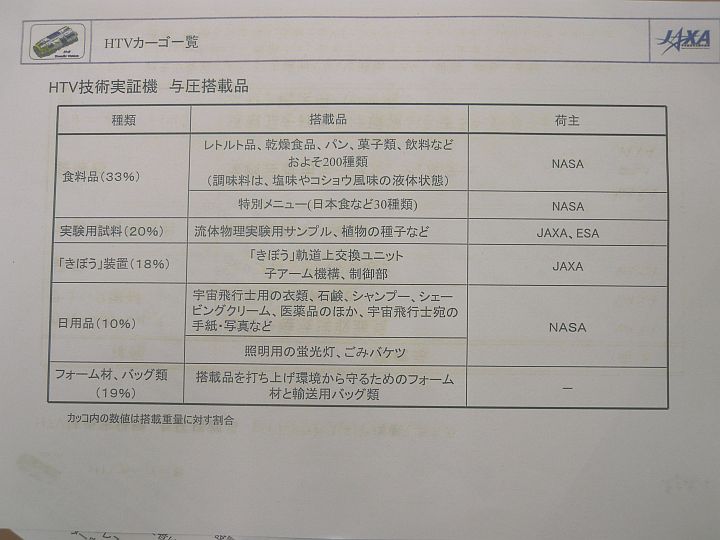
HTVの最大補給量は約6トンだが、HTV初号機ではISSドッキングの前に運用検証を行なうため、通常より多くの推進剤とバッテリをHTV-1に搭載した。そのため、HTV-1の補給量は与圧部3.6トン、非与圧部0.9トンの計4.5トンであった[2][3]。 補給キャリア非与圧部にはきぼう船外実験プラットフォームに取り付けられる日本の超伝導サブミリ波リム放射サウンダ(SMILES, 475kg)とNASAの「沿岸海域用ハイパースペクトル画像装置および大気圏/電離圏リモート探知システム実験装置」(HREP, 381kg)が搭載された[2]。 補給キャリア与圧部にはHTV補給ラック(HRR)が7台、きぼう保管ラック(PSRR)が1台搭載された。これらの内容物は食料(重量33%)、科学実験用物資(20%)、きぼうロボットアームの子アーム(18%)、衣服・洗面用化粧品・手紙・写真・蛍光灯・屑入れバケツといったクルーへの補給品(10%)、その他(19%)である[2][4]。 サクセスクライテリア HTV-1ミッションでは以下の3つのサクセスクライテリア(成功基準)が設定された。
運用打上げ前4月22日HTV-1の本体(電気モジュール+推進モジュール)、非与圧キャリア、与圧キャリア、曝露パレットを種子島島間港にて陸揚げし、種子島射場に搬入された[6]。それぞれ以下のようなスケジュールを経て6月23日から26日に全機結合された[6]。
その後推進系・電気系の点検(6/25 - 7/22)、推進薬の充填(7/28 - 8/10)を経て、8月18日の納入前審査で組立及び射場搬入後試験結果が審査され、21日にHTV-1が製造企業より受領された[7]。そしてHTV・ペイロード分離部の結合(8/21 - 22)、フェアリング装着(8/23 - 24)、大型ロケット組立棟への移動(8/30)、ロケットへの結合(8/31)が行われた[7]。 そして9月3日から4日にかけて、打上げ直前に積み込む必要のある実験試料など、最後のペイロードを補給キャリア与圧部へ搭載する作業が行われ、打上げに向けた準備が整った[8]。 H-IIBロケットの試験HTV-1の打上げにはH-IIBの初号機が使用された。 打上げの前に、2度の実機型タンクステージ燃焼試験(CFT)が行われた。初回の試験では2009年3月27日に10秒の燃焼を行う予定だったが、事前に行われた極低温点検で冷却水供給異常事象が確認され、試験は延期された[9]。後に移動発射台に冷却水を供給する供給元弁(手動弁)が閉じていたことが原因と判明し[10]、試験日は4月1日に再設定された。しかし、4月1日に防消火系設備配管の継手部から漏水が発見され、試験はまたしても延期となった[11]。翌日の4月2日の14時00分に第1回CFTが実施され、良好に終了した[12]。 続いて2回目の試験では4月20日に150秒間の燃焼を行うことが予定された[13]。天候の悪化が予想されたため22日に延期され、22日13時00分に第2回CFTが実施された[14]。 7月11日にはH-IIBロケットの地上総合試験が行われた[15]。 打上げからISSとのランデブー    2009年7月8日にHTV-1の打上げを9月11日に実施し、打上げ予備期間を9月12日から9月30日にすることが発表された[16]。 当初から計画していた2009年9月11日2時1分46秒(JST、以下全てJST)にHTV-1を搭載したH-IIBロケットが打ち上げられた[17]。打上げから15分10秒後にHTV-1が分離された[17]。遠地点高度299.9 km(300.0 km±2km)、近地点高度199.8 km(200.0 km±10km)、軌道傾斜角51.69度(51.67度±0.15度)でHTV-1の軌道投入に成功した(括弧内の数値は計画値)[17]。打上げは種子島宇宙センターの吉信第2射点から行われ、この打上げが第2射点の初使用となった[18]。 運用スケジュールは飛行日(Flight Day: FD、ISSクルーの起床から始まる1日のスケジュール)に基づいて行われた[2][3]。打上げのあった日が飛行1日目である[3]。 飛行1日目での軌道投入後はHTVのサブシステムが自動起動し、姿勢制御、機体の異常点検、HTV運用管制室との通信接続が行われ、ランデブ用軌道制御が始まった[2]。 飛行3日目に衝突回避運用(Collision Avoidance Maneuver: CAM)といったHTVの運用検証が行われた。これらは成功し、飛行6日目にはISSミッション管理会議(Mission Management Team: MMT)においてHTV-1のISSへの最終接近運用が承認された[19]。 飛行7日目の9月16日午前9時4分[20]、飛行8日目の9月17日午後6時26分および同日午後9時28分[21]に高度調整マヌーバを実施し、ISS後方5kmの接近開始点(Approach Initiation: AI)に到着しISSに対して相対停止した。 飛行8日目の9月18日午前0時31分に接近開始点を出発してISSへの接近を再開。GPS相対航法でISSの下方約500mのRバー開始点(R-bar Initiation: RI)に移動し、同日午前1時38分に到着した[22]。到着後はランデブセンサ(Rendezvous Sensor: RVS)から照射したレーザ光を、「きぼう」船内実験室の下側に設置された反射器に反射させて位置を確認しながら1 - 10m/s程度の速度で下方からISSに接近し[2]、同日午前1時48分、ISS下方300mのホールドポイントで自動停止し、緊急時の衝突回避運用のため、HTV-1のヨー方向(横方向)の姿勢を180度変更した[2][23]。このモードで9番スラスタのインジェクタ温度が上限近くまで上昇するという事象が発生したため、遠隔操作にて主系と冗長系を交互に切替えを行いながら飛行を継続した[24]。スラスタの作動回数はほぼ予定通りで、温度上昇が想定外だったという[25]。 同日午前2時55分ホールドポイントを出発し、午前3時44分ISS下方30mのパーキングポイントで自動停止した[26]。午前4時05分パーキングポイントを出発し、午前4時27分、ISS下方10mのバーシングポイントに到着し、ISSに対して相対停止が確認され、スラスタのエンジンが停止された[27][28]。この最終アプローチ中、緊急時にはISSクルーが搭乗員用コマンドパネル(HCP)で、接近の一時停止や後退、接近中止といったコマンドによるHTVの制御が可能だったが[2]、これらコマンドはデモンストレーション以外には使用されなかった[24]。 午前4時51分、ニコール・ストットが操作するカナダアーム2によるHTV-1の把持が完了し、午前4時51分に完全に固定された[29]。HTV-1の相対静止は良好で、フリードリフト直前の相対速度は秒速2mm以内(規定5mm以内)に抑えられ、ストットは「フリーフライヤのキャプチャとは思えないほど、HTV は完全に停止して見えた」とコメントした[24]。 午前6時41分、HTV技術実証機のISSへの結合作業が開始され、午前7時26分にハーモニーモジュールの共通結合機構(CBM)に取り付けられた[30][31]。このロボットアームを使用した宇宙船の結合(キャプチャー・バーシング方式)は世界初の試みだった[24]。 なお、アームを操作したストットは初号機成功のお祝いとして、筑波宇宙センターの管制室に寿司の出前をプレゼントした[32]。サプライズの演出だったようで、管制室の緊張は一気にほぐれたという[32]。 ドッキング中の作業    飛行9日目となった9月18日午前9時36分、ハーモニー側のハッチが開けられ、第20次長期滞在のISSクルーはハーモニー側から結合部の艤装(配線・ケーブル設置、CBMの制御装置取外し)を実施し[2]、午前10時49分に作業を終えISSへの結合が完了した[33]。9月19日午前3時23分に補給キャリア与圧部のハッチが開けられ[34]、モジュール間通風換気により、循環ファンユニットでハーモニーとの空気循環が行なわれた[2]。そして午前3時25分、ISSクルーがHTV-1の与圧部内に入室した[34]。ISSクルーは入室と同時に与圧部内の空気の検査を行い、緊急手順書の配備、消火器、可搬式酸素マスクの取付けが行われた[34]。 飛行13日目から、補給キャリア与圧部内の搭載品の移送作業が本格的に開始された[35]。 飛行14日目の9月23日午後6時6分、曝露パレットがカナダアーム2によって補給キャリア非与圧部から取り出され、午後8時13分、曝露パレットがカナダアーム2からきぼうロボットアーム(JEM-RMS)に受け渡され、午後10時33分きぼうロボットアームによって船外実験プラットフォームへの曝露パレット仮置き作業が完了した[35]。なお、JEM-RMSを使ったロボットアーム間の受け渡しは今回が初めての運用だった[24]。 飛行15日目の9月24日午後6時21分にHREPが曝露パレットからロボットアームで取り出され、午後8時15分に船外実験プラットフォーム装置交換機構(EFU)6番に取り付けられた[36]。続いて9月24日午後11時23分にSMILESがロボットアームで把持され、9月25日午前1時12分にEFU3番に取り付けられた[36]。 飛行16日目の9月25日午後6時7分、使用済みとなった曝露パレットを船外実験プラットフォームから取り外し、曝露パレットはきぼうロボットアームからカナダアーム2へと受け渡され、午後10時20分にHTVの補給キャリア非与圧部へ収納された[37]。 10月20日に補給キャリア与圧部内に搭載された物資の搬出作業がすべて完了し、以後ISSの使用済み物資などの不要品をHTVに積み込んでいった[38]。 ISSの搭乗員HTV-1の到着時には第20次長期滞在のメンバーが滞在していた。 HTV-1の離脱時には第21次長期滞在のメンバーが滞在していた。
またHTV-1がドッキングしている間に、ISSには宇宙飛行関係者であるギー・ラリベルテが訪れた。 HTV-1が取り付けられている間に日本人がISSに滞在することはなかった。 HTV-1の分離と大気圏再突入  第21次長期滞在のISSクルーはHTVの分離に先立ち、補給キャリア与圧部内の蛍光灯およびHTVが運んできた煙探知機を取り外す作業を行った[39]。蛍光灯はISS共通品であるので他のモジュールの予備品として、煙探知機は今後打ち上げられるHTVで再利用するためそれぞれISS内で保存される[39]。 HTV-1与圧部へのISSの不要品収容作業は10月29日までに完了し、728kgの廃棄物資と896kgの空ラック、計1,624kgが搬入された[5]。 10月30日午前2時32分に補給キャリア与圧部のハッチが閉じられた[39]。その後結合部の配線・ケーブルが取り外され、モジュール間通風換気(IMV)を停止した[2]。 ISSからのHTV-1取外し時刻は10月30日午後10時30分頃、カナダアーム2からの放出は10月31日午前1時5分頃を当初予定していたが、HTV-1がISSから離れた直後にアボートが発生した場合スペースデブリ(コスモス2421号)がHTV-1に接近・衝突する可能性があることが判明したため、作業をISSの1周回分(90分)遅らせることになった[5][40]。ISSへの衝突の可能性はなかったので、ISS自体の軌道変更はなかった。 10月31日午前0時2分、HTV-1はカナダアーム2によってISSから取り外され[41]、アームによって放出ポイント(ISS下方12m)まで運ばれ、太平洋上空を通過中の10月31日午前2時32分、HTV-1が放出された[42]。 同日午前2時38分、ISS近傍から離脱するため噴射を開始した[42]。 11月1日午前9時00分に3つのCPUのすべてがエラーとなる不具合が発生し、そのままでは軌道離脱マヌーバに支障が出る事態となったが、全てのCPUをリセットし、さらに変数領域のデータ(航法誘導制御系)を再度設定し直すことで、同日20時45分に復旧した[5]。 その後軌道離脱マヌーバを11月1日23時55分(8分間)、11月2日午前1時25分(9分間)、11月2日午前5時53分(8分間)の計3回行った[5]。3回目のマヌーバ後の軌道は約335×56kmで[5]、11月2日午前6時26分頃、ニュージーランド上空において高度120kmに達し、大気圏に再突入を果たしてミッション終了となった[43]。 機体のほとんどは大気との空力加熱で燃焼したが、燃え残った一部が6時38分から6時58分にニュージーランド東方の南太平洋上(スペースクラフト・セメタリー)に落下したと推定された[5]。
事後評価ミッション終了後、2010年9月15日付けで宇宙開発委員会から事後評価の指示があり、JAXA側の準備も整ったので、宇宙開発委員会の推進部会において宇宙ステーション補給機(HTV)技術実証機プロジェクトの事後評価(成果、成否の原因に関する分析、効率性)が行われた[44]。成果についてはアウトプット(結果)、アウトカム(効果)、インパクト(波及効果)の3つに分類して評価された[44]。 成果アウトプットアウトプットは具体的にどのような結果が得られたか、プロジェクトの目標がどの程度まで達成されたのかという直接的成果である[44]。 予定してた飛行計画が全て成功し、ミッションサクセスクライテリアに規定されたミニマムサクセス、フルサクセスを達成した[45]。また
として、エクストラサクセスも達成したと評価された[45]。 このほかにも日本国家の要求条件(「宇宙開発に関する長期的な計画」、平成20年2月22日総務大臣・文部科学大臣)やJAXAの「有人宇宙環境利用ミッション本部事業計画書」(平成20年9月、JAXA-2008022)における要求を全て達成したと評価された[45]。 アウトカムアウトカムはアウトプットからもたらされた効果・効用である[44]。今回のHTV-1ミッションの成功により、日本のISSへの補給義務を履行でき、さらにスペースシャトルの退役後は曝露機材及び大型与圧機材を輸送できるのはHTVのみとなり、HTVは宇宙ステーションの維持に不可欠な補給手段となったと言え、日本の国際的プレゼンスの向上に繋がった[45]。 またHTVは人工衛星、ロケット、宇宙ステーションの技術を統合した日本初の有人施設対応の輸送機(宇宙船)であり、日本の宇宙開発技術の維持・発展、および人材育成に貢献した[45]。 インパクト インパクトは、意図していた範囲を越えた、経済的、科学技術的、社会的影響としての間接的成果である[44]。 HTV-1によって世界初のキャプチャ方式によるドッキング(バーシング)が実証され、このキャプチャ・バーシング方式を米国商業民間輸送機 (COTS/CRS) が採用した[45]。さらに当時開発中であったシグナスがHTVと同等の近傍通信機器 (PROX) を三菱電機から購入する(9機分、約60億円)など、日本技術の優位性を世界に示し、宇宙産業活性化へ繋がった[45]。 またマスメディアでもHTV-1ミッションは盛んに報道され、テレビでは計3時間25分54秒分の報道があった[45]。さらにテレビCMにて三菱電機はHTV開発への参加を宣伝し、パナソニック電工は与圧キャリア用のLED照明装置の開発実績を宣伝した[45]。その他の下請け企業も宣伝・広告にHTV-1を利用した[45]。 経済波及効果は、HTVの波及倍率を2.53とした分析に従うと概算で約1568億円である[45]。 成否の原因に対する分析設計や製造に起因する大きな不具合もなく、確実な運用を進めることができたと評価された[46]。しかし、機器が使用不能になる故障こそ発生しなかったものの、複数の問題が運用中に発生した[46]。
プロジェクトの効率性に対する分析1997年に開発着手した当時は、きぼう組立て完了から約3ヶ月後となる2001年度のHTV技術実証機打上げを計画していた[46]。しかし、ロシア・サービスモジュールの遅れやコロンビア号空中分解事故の影響などによる宇宙ステーション組立全体の遅延に伴い、きぼう組立て完了が2009年となったことから、最終的にHTV技術実証機は2009年末打上げとして計画された[46]。この約8年延長された開発期間を活用して、追加安全要求の反映や、曝露輸送の追加といった要求変更等に対応し、安全・信頼性の向上、およびHTVの位置づけの向上などを図ることができた[46]。 開発着手した1997年における総開発経費は打上げ費用除外で280億円だったが、当時の計画では冗長系は一部のみで、太陽電池無し、近傍通信装置はISSのGPS情報を流用する、といった現在と異なる内容だった[46]。しかし1997年4月のプログレスM-34によるミール衝突事故を反映して、NASAからの追加要求が発生し、さらにはISSに接近する無人機の開発経験がNASAにもなかったため、HTVの開発進捗に合わせて安全要求が追加された[46]。このため2002年デルタ基本設計審査会ベースラインでは394億円と見積もりが増加し、その後もNASA安全要求対応設計の取り込み、海外調達品の価格高騰、追加検証試験などで、結局2006年度のプロジェクト資金の見直しでは677億円と設定された[46]。これ以降もマイナーな設計変更や打上げ延期があったが、適切なコスト管理によってプロジェクト完了時の開発費は計677億円と予算超過もなく、文部科学省独立行政法人評価委員会は「S」評価を下した[46]。またATV初号機の開発費が11.3億ユーロ(約1700億円, 147円/ユーロ換算)であることから、HTV開発費は計画当初の予算から約2.4倍増大してはいるものの、これは妥当な結果だと見なされた[46]。なお比較として、ATVは当初の予算から3.24倍の増加を見せている[46]。 また輸送コスト単価でもHTVは他の輸送機に比べ優位性があると評価された[46]。1トンあたりの輸送コストはATVが約58億円(134円/ユーロ)、スペースシャトルが約76億円(94円/ドル)であるのに対し、HTVは約47億円であった[46]。なおプログレス補給船はコスト非公表となっている[46]。 受賞
参考文献
関連項目
外部リンク
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||





{kind=link}
Portal di Ensiklopedia Dunia