电子工程中的頻率補償(Frequency compensation)是應用在放大器電路(特別是有負回饋的放大器電路)中的技巧。頻率補償有二個主要目的:避免在無意中產生正回饋(會造成放大器的電子振盪),並且控制放大器在階躍響應下的过冲和振鈴。頻率補償也常用來改善單极点系統的带宽。
說明
![]() 圖1:二極點放大器電路在不同補償下的階躍響應。參數ζ可以用補償電容器調整。ζ較小時反應較快,但振鈴和過沖會較大
圖1:二極點放大器電路在不同補償下的階躍響應。參數ζ可以用補償電容器調整。ζ較小時反應較快,但振鈴和過沖會較大
大部份的放大器電路都會用負反饋,在增益和其他理想特性之間取捨,理想特性有扭曲量較小、抗雜訊能力變強,或是系統特性不容易隨溫度而變化。理想上,放大器频率响应中,其相位特性會是線性的,不過因為設備的限制,這在物理上是無法達到的。因為放大器增益段的電容,每增加一個极点會使輸出信號落後輸入90°[a]。若相位落後累積到180°,輸出信號會和輸入信號反相位,此時的反饋就屬於正反饋,不是負反饋了。若增益夠大的話,輸出信號的反饋到輸入信號,會讓放大器振盪。頻率補償的目的就是要避免這類的問題。
頻率補償的另一個目的是要控制放大器電路的階躍響應,如圖一所示。以電壓放大器為例,若輸入是階躍訊號,理想上輸出信號也會是階躍訊號。不過因為放大器的頻率響應,其輸出不會是理想的階躍訊號,會出現振鈴。一般常會用幾個性能指標來描述階躍響應。一個是輸出的上昇時間,理想上越短越好。另一個是安定時間,是輸出維持在最終值附近的時間,也是越短越好。輸出訊號可能會有过冲(輸出超過最終值的程度),理想上過沖越小越好。這些性能指標常常是互相衝突的,因此需要最佳化方式。
頻率補償可以最佳化階躍響應,是一種可以極點分離的方法。
應用在運算放大器上
由於運算放大器無所不在,也可以配合反饋使用,以下的討論會以運算放大器的頻率補償為主。
需要知道的是,就算是最簡單的運算放大器,其輸出都至少有二個極點。因此在特定的臨界頻率時,其放大器輸出信號的相位和輸入信號的相位會差-180度。若此時的增益是1,甚至大於1,就會出現振盪。原因是
- 反饋是接在運算放大器的反相輸入,因此又增加了−180度的相位,使相位差變成−360°
- 增益夠大,足以引發振盪。
更準確的說法是:運算放大器會共振在開迴路增益等於閉迴路增益的頻率,若在此頻率下
- 放大器的開迴路增益≥ 1
- 開迴路信號相位和回授電路的相位響應相差−180°
若以數學來表示
- ΦOL – ΦCLnet = −180°
實務
頻率補償是調整放大器開迴路輸出,或回授電路(也可能兩者都修改)的增益和相位特性,以避免會造成振盪的條件。這多半是靠加入內部或外部的電阻—電容網路來實現。
主極點補償
最常用的方式稱為主極點補償(dominant-pole compensation),屬於落後補償(lag compensation)。這是外部補償技術,用在閉迴路增益比較低的應用。此作法會將極點放在開迴路響應中比較低的頻率,以降低小於或等於下一個極點頻率的放大器增益,使其低於1(0 分貝)。最低頻率的極點稱為主極點 (dominant pole),因為此極點會主控所有較高頻極點的效果.其結果在放大器的增益為1或小於1時,其開迴路輸出相位和回授網路(沒有電感性元件)的相位差不能低於−180°,以確保其穩定性。
主極點補償可以用加上積分電容器的通用運算放大器實現。電容器會產生一個極點,極點的頻率夠低,讓下一個較高極點頻率的增益可以降到1(0 dB)。其結果是相位裕度大約45°,依此極點和較高頻極點頻率的距離而定[b]。 此裕度要大到可以避免常見回授組態中常見的振盪。此外,主極點補償也可以控制在階躍響應下的过冲和振鈴,這比單純針對穩定性要求更嚴格的要求。
補償方式描述如下:
令A是運算放大器在開迴路組態下未補償的傳遞函數,其公式如下:

其中
- AOL是運算放大器的開迴路增益
 是增益掉到 -20dB、-40dB和-60dB的頻率。
是增益掉到 -20dB、-40dB和-60dB的頻率。
因此,為了補償,會加入有RC電路的運算放大器,以加入主極點
 主極點補償的開迴路運算放大器示意圖
主極點補償的開迴路運算放大器示意圖
其補償後的傳遞函數如下:
 TF after Dominant pole compensation
TF after Dominant pole compensation
其中fd < f1 < f2 < f3
補償電容器C的值需要使fd < f1。因此,主極點補償後的頻率響應會在小於fd部份為1,在大於fd部份會往降低。
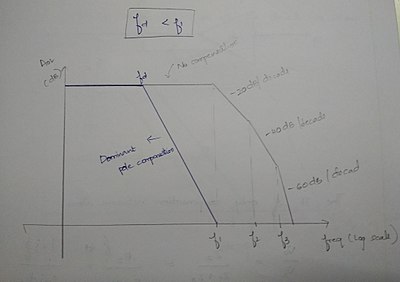 主極點補償後的頻率響應
主極點補償後的頻率響應
主極點補償的優點為:
- 此方式簡單有效
- 在頻寬以外的增益降低,可以提昇雜訊免疫能力。
主極點補償的缺點為:
- 主極點補償降低放大器的頻寬,因此在較高頻率的開迴路增益較低。因此在高頻時的失真校正能力會比較弱。
- 此方式會降低放大器的电压转换速率,因為是需要將電容器充電。因此會讓放大器無法在高振幅下精確的輸出快速變化的資料。
主極點補償可能會產生一種稱為極點分離的現象。加入主極點後,會讓未補償時的最低頻率極點會移到更低的頻率,成為了主極點,未補償時的較高頻率極點會移到更高的頻率。為了避免這種缺點,會會使用極零點補償(pole zero compensation)。
其他方式
其他補償方式有:超前補償、超前-滞后补偿器以及前饋补偿。
- 超前補償(Lead compensation) 主極點補償是在開迴路響應中加入或調整極點,而超前補償是加入零點[c]。在開迴路響應中可以和已有的極點相消。
- 超前-滞后补偿器(Lead–lag compensation) 在開迴路響應中加入一個零點和一個極點。極點一般會在開迴路增益小於1的頻率。
- 前饋(Feed-forward)補償會用電容來在高頻時旁路放大器的一極,消除此極產生的極點。
這三種方式的目的是增加開迴路頻寬,並維持閉迴路的穩定性。常用來補償高增益、寬頻寬的放大器。
參考資料
- ^ 在此段文字中,极点是指因為積分電阻以及電容性電抗,使得在頻率響應圖上,其振幅會減少3db的點。最終,每個極點會增加90度的相位落後,也就是輸出信號會落後輸入信號90度的相位。有關極點的數學概念,可以參考极点
- ^ 主極點會在從極點頻率十倍的頻率到下一個極點頻率1/10的頻率之間,產生約-90度的相位差。下一個極點,會再增加−45°的相位差(忽略其他更高頻的極點。)
- ^ 此文字中的零點,是指因為微分電阻或是電容電抗,讓頻率響應上增加3db的頻率。每一個零點會使相位領先90°,輸出信號的相位會領先輸入信號90度。
相關條目



