|
Hiller VZ-1
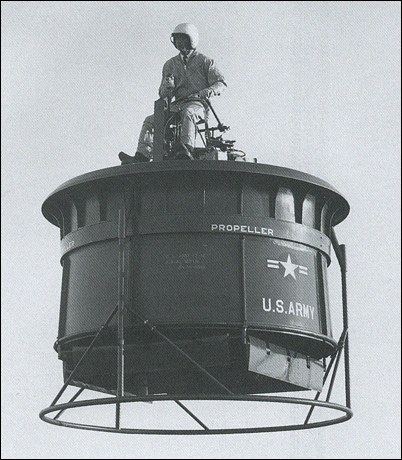
 Die Hiller VZ-1 Pawnee (Werksbezeichnung Model 1031) war ein senkrecht start- und landefähiges Luftfahrzeug des US-amerikanischen Herstellers Hiller Helicopters Company, das von der konstruktiven Auslegung her, als Kleinsthubschrauber angesehen werden kann. Es wurden mindestens drei Prototypen gebaut. Eine ähnliche Entwicklung stellt das in jüngster Zeit (2019) bekannt gewordene Flyboard Air von Franky Zapata dar. Hier werden jedoch statt der durch Kolbenmotoren angetriebenen Rotoren, Strahltriebwerke verwendet. GeschichteVorab sei angemerkt, dass die Entwicklung der VZ-1 in der Literatur stark widersprüchlich dargestellt ist. So werden bei Harding (1990) und Jim Winchester (2005) (zitiert bei Aviastar[1]), Aerofiles[2] und Jay P. Spenser (2003) lediglich drei gebaute Exemplare angegeben, während auf der Website von Hiller[3] der Bau von sechs Maschinen beschrieben wird. Unstrittig ist dagegen, dass nur zwei Exemplare die Army-Bezeichnung VZ-1 (s. Bezeichnungssystem für Luftfahrzeuge der US Army von 1956 bis 1962) und eine militärische Seriennummer erhalten haben. VorgeschichteAm Ende des Zweiten Weltkriegs begann Charles H. Zimmerman mit der Entwicklung eines senkrechtstartfähigen Fluggeräts, das den Beinamen Flying Shoes (dt.: Fliegende Schuhe).[4] trug. Dies war eine Plattform aus Stahlrohren mit zwei kleinen Zweitakt-Vierzylinder-Triebwerken eines Zieldarstellungsflugkörpers, die nach oben zeigende Propeller antrieben. Der Pilot schnallte seine Füße fest und erhöhte die Motordrehzahl mittels eines Drehgriffs. Die Steuerung erfolgte durch Gewichtsverlagerung („kinesthetische“ Steuerung), indem sich der Pilot in die gewünschte Flugrichtung lehnte. Stanley Hiller besuchte Zimmerman in Connecticut und ließ dessen Fluggerät nach Kalifornien zur Erprobung in sein Unternehmen bringen. Anfang 1948 kamen die Flying Shoes in Palo Alto an, wo erste gefesselte Flüge in Bodennähe durchgeführt werden konnten. Die zwei nicht gekoppelten Motoren machten eine gleichmäßige Leistungsabgabe auf die zwei Propeller schwierig; der Ausfall eines Motors hätte darüber hinaus unweigerlich zum Absturz geführt. Die Versuche wurden noch 1948 eingestellt und erst wieder aufgenommen, nachdem das Office of Naval Research (ONR) an Hiller herangetreten war und ihn am 17. September 1953 beauftragte eine verbesserte Version (Model 1031) zu entwickeln, bei der das Mantelpropellerkonzept von Alexander Satin berücksichtigt werden sollte.[5] Neben Hiller erhielt auch de Lackner einen Auftrag zum Bau einer fliegenden Plattform, die jedoch offene Rotoren verwendete. Die Betreuung des Programms erfolgte durch das ONR im Auftrag der US Army. Model 1031Im September 1954 war der Bau des Model 1031 (noch ohne militärische Bezeichnung und Seriennummer) abgeschlossen. Das VTOL-Forschungs-Luftfahrzeug, sollte zum einen die Einsetzbarkeit des Mantelpropellers als Antriebseinheit und zum anderen den potentielle militärischen Wert als taktisches Aufklärungs- und Transportfahrzeug untersuchen.[6] Der erste Prototyp erhielt die temporäre Army-Bezeichnung YHO-1E.[7] Der erste ungefesselte Flug konnte im Februar 1955 durchgeführt werden. Der erste Prototyp wies eine oberflächliche Ähnlichkeit mit der zur gleichen Zeit entwickelten de Lackner HZ-1 auf, die ebenfalls zwei kleine Kolbenmotoren verwendete, um unterhalb der Plattform angeordnete, gegenläufig rotierende Propeller anzutreiben. Bei der Model 1031 waren die Propeller jedoch verkleidet (s. Mantelpropeller). Das Schwebeflugverhalten der fliegenden Plattform war relativ stabil. Beim Vorwärtsflug zeigte sie darüber hinaus ein selbststabilisierendes Verhalten, ein Kippen war deshalb fast unmöglich. Gleichzeitig begrenzte diese Eigenschaft jedoch die Vorwärtsgeschwindigkeit auf 26 km/h. Bei diesem Konzeptmodell trieb noch jeder der beiden Zweitaktmotoren jeweils einen Rotor an, was bei Ausfall eines Motors zu einem totalen Steuerungsversagen geführt hätte. Model 1031-ADie Army war von den Flugleistungen des Geräts während der Erprobung soweit beeindruckt, dass sie im November 1956 ein weiteres, modifiziertes Exemplar in Auftrag gab mit dem eine Einsatzevaluierung durchgeführt werden sollte. Die nun als VZ-1 bezeichnete Variante (Model 1031-A, US-Army-Seriennummer 56-6944) unterschied sich von der ersten Ausführung durch die Ergänzung eines dritten Motors und einer Propellerummantelung mit einem größeren Durchmesser. Die Maschine hatte 1958 ihren Erstflug. Beide Motoren wirkten nun gemeinsam auf beide Rotoren. Bei einem Motorenausfall würde zwar ein schneller Abstieg erfolgen, aber kein Steuerungsverlust auftreten. Statt dem nun nicht mehr möglichen Steuerverfahren um die Hochachse mittels differentieller Drehzahlregelung der Motoren, wurden im Lufteinlauf bewegliche Luftleitbleche installiert. Aufgrund der geringen Motorleistung konnte diese Ausführung nur im Bereich des Bodeneffekts betrieben werden. Model 1031-A-1Hiller ermittelte für das Model 1031-A eine zu hohe Kreisflächenbelastung der beiden Rotoren, worauf längere Rotorblätter verwendet wurden. Dies machte jedoch die Konstruktion einer größeren, dritten Plattform notwendig, die nun die Bezeichnung Model 1031-A-1 (56-6945) erhielt und am 20. November 1957 zum ersten Mal flog. Zu diesem Zeitpunkt übernahm die US Army den US-Navy-Vertrag mit Hiller. Zwar konnte die neue Plattform dank der neuen Rotoren mit 2,13 m Durchmesser nun außerhalb des Bodeneffekts operieren, dafür gab es nun ein weiteres Problem. Durch das größere Gewicht verlagerte sich der Schwerpunkt so weit nach unten, dass die Steuerung mittels Verlagerung des Körpergewichts nur noch eingeschränkt wirksam war. Das erhöhte Gewicht führte auch zu einer Verringerung der Flugstabilität, die durch eine Gewichtsverlagerung des Piloten nicht ausgeglichen werden konnte. Neben der Erhöhung der Pilotenposition wurde daraufhin auch ein Kreisel-Stabilisierungssystem, das aus dem Hubschrauber Hiller UH-12 stammte, eingebaut. Dieses System war mit nun mit im Propellerabstrom angeordneten Leitblechen verbunden und konnte die Stabilität tatsächlich erheblich verbessern. Die Schießdemonstration eines Soldaten auf der Plattform zeigte das stabile Flugverhalten sehr deutlich.[8] Beim Vorwärtsflug traten jedoch schon bei leichtem Wind unvorhersehbare Schwingungen auf, die vom Stabilisierungssystem nicht ausgeglichen werden konnten.[9] Die drei Maschinen lieferten eine Vielzahl von Informationen über VTOL-Flüge im Allgemeinen und zu den Eigenschaften von Mantelpropellern im Speziellen. Im Endeffekt war das Konzept der Fliegenden Plattform jedoch zu schwerfällig, zu langsam und mechanisch zu anfällig um von einem echten Wert für den Kampfeinsatz sprechen zu können. Die weitere Entwicklung wurde eingestellt und bis 1963 waren alle Exemplare stillgelegt worden. Eine Maschine ist heute (2019) im Udvar-Hazy Center des National Air and Space Museums ausgestellt. Weitere Exemplare?Nach einer Quelle[10] erteilte die US Army noch einen Auftrag über drei weiterzuentwickelnde Exemplare der VZ-1, die ebenfalls drei (stärkere?) Motoren verwenden sollten. Diese Vorgabe machte eine nochmalige Vergrößerung der Rotordurchmesser auf 2,44 m notwendig. Dies führte jedoch zu einer weiteren Verstärkung der Steuerungsprobleme, sodass eine kinästhetische Steuerung nicht mehr möglich war. Hiller versuchte durch eine Verlängerung der Rotorummantelung die Stabilität zu erhöhen und entwickelte zusätzlich ein mehr konventionelles Steuerungssystem bei dem ein Pilot in Sitzposition einen Steuerknüppel bediente der mit den Luftleitblechen verbunden war. Diese Ausführung erreichte zwar eine höhere Vorwärtsgeschwindigkeit, die restlichen Steuerungs- und Instabilitätsprobleme bleiben jedoch ungelöst.  KonstruktionDer VZ-1 ist ein Ein-Mann-Kleinsthubschrauber, bei dem der Pilot auf einem runden Gestell steht, unter dem sich zwei gegenläufige Koaxialpropeller in einer aus Glasfaser-Verbundwerkstoff bestehenden Verkleidung drehen. Der Durchmesser der Propeller wurde in mehreren Stufen von 1,53 m auf 2,44 m erhöht. Anfangs im Lufteinlauf und später im Abstrom, waren zusätzlich acht bewegliche Leitbleche zur Verbesserung der seitlichen Stabilität angebracht. Die Steuerung erfolgte durch den aufrecht stehenden Piloten über eine einfache Gewichtsverlagerung in die gewünschte Flugrichtung, auch als kinästhetische Steuerung bezeichnet. Die Drehzahlregelung des Motors war motorradähnlich mit einem einfachen Gasgriff vorgesehen. Die zweite Maschine hatte ein vereinfachtes Steuerpult. Die letzte VZ-1 besaß gegenüber den ersten beiden Maschinen einen sehr viel höheren Propellermantel und statt den vorherigen Drei- und Vierpunkt Landegestellen, eine kreisförmige Landekufe. Auch die Steuerung war nun ähnlich der in einem Hubschrauber ausgelegt. Siehe auchLiteratur
WeblinksCommons: Hiller VZ-1 Pawnee – Sammlung von Bildern, Videos und Audiodateien
Einzelnachweise
|
||||||||||||||||||||||
.jpg)
{kind=link}
{kind=link}
{kind=link}