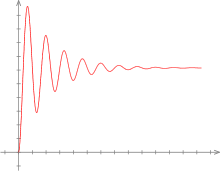
 暫態響應中典型的有阻尼振盪,輸出值會振盪,漸漸收斂到最終值(此處為欠阻尼的響應)
暫態響應中典型的有阻尼振盪,輸出值會振盪,漸漸收斂到最終值(此處為欠阻尼的響應)
暫態響應(transient response)是指系統離開平衡狀態或是穩態後會有的變化。暫態響應不一定只是和突然的事件有關,而是和所有會影響系統平衡狀態的事件都有關係。像脈衝響應和步階響應都是對應特定輸入信號下的系統響應。
阻尼
響應可以依阻尼分為三類,對應系統輸出和穩態之間的關係。
- 欠阻尼(Underdamped)
- 欠阻尼響應是指輸出會振盪,但其振幅包絡線會漸漸縮小。欠阻尼越嚴重,振盪持續的時間也越長,欠阻尼的阻尼比小於一。
- 臨界阻尼(Critically damped)
- 臨界阻尼響應是指輸出不在欠阻尼的情形下(因此會振盪),但會以最快時間回到穩態。此狀態是介於欠阻尼和過阻尼之間的臨界狀態。臨界阻尼的阻尼比等於一,理想上,臨界阻尼的系統不會振盪。
- 過阻尼(Overdamped)
- 過阻尼響應是指輸出不會在穩態附近振盪,但和臨界阻尼相比,需要花較長的時間才能回到穩態,過阻尼的阻尼比大於一。
特性
 典型二階暫態系統的特性
典型二階暫態系統的特性
暫態響應會有以下的量化特性。
- 上昇時間(Rise time)
- 上昇時間是指信號從特定低準位上昇到特定高準位的時間,一般而言,會以步階高度的10%及90%為基準。
- 過沖(Overshoot)
- 過沖是指信號上昇超過其目標值的情形,一般會和振鈴有關。
- 安定時間(Settling time)
- 安定時間是在理想步階輸入下,系統輸出和目標值的誤差維持在特定誤差範圍內的時間[1],也就是以下條件滿足的時間:

- 其中
 是穩態值,而
是穩態值,而 是誤差範圍。
是誤差範圍。
- 延遲時間
- 延遲時間是響應第一次到達目標值一半的時間[2]。
- 峰值時間
- 峰值時間是指響應到達過沖的第一個最高點的時間[2]。
- 穩態誤差(Steady-state error)
- 2003年的《Instrument Engineers' Handbook》定義穩態誤差是在系統進入穩態時,"理想最終輸出和實際最終輸出之間的差異",若沒有外部擾動,可以假設系統會持續維持此誤差[3]。
相關條目
參考資料
- ^ Glushkov, V. M. Encyclopedia of Cybernetics 1. Kyiv: USE. : 624 (俄语).
- ^ 2.0 2.1 Ogata, Katsuhiko. Modern Control Engineering 4. Prentice-Hall. : 230. ISBN 0-13-043245-8.
- ^ Liptak, Bela G. Instrument Engineers' Handbook: Process control and optimization 4th. CRC Press. 2003: 108. ISBN 0-8493-1081-4.

